
Product introduction
产品介绍
机器人高精密摆线行星减速机由一个行星齿轮减速机的前级和一个摆线针轮减速机的后级组成。此减速机具有高精度、大速比、高刚性、高过负载及长寿命特点,且具有振动小,噪音低,能耗低等优点,是最常用的减速机之一。
谐波传动减速机是利用柔性元件可控制的弹性变形来传递运动和动力的机械传动装置。 它具有传动比大并且范围广、精度高、空回小、体积小、重量轻、传动平稳、噪声小、可向密封空间传递运动等特点。
环动科技倾力为客户提供覆盖3-1000KG负载机器人所需的高精密减速机整体方案。
工业机器人
医疗
风力
雷达
太阳能
航天航空
operating principle
工作原理

SHPR-C减速机是由一个行星齿轮减速机的一级和一个摆线针轮减速机的后级组成的二级减速机。第一级减速经中心齿轮的旋转由中心齿轮上的大齿轮传递到行星齿轮,按齿数比进行减速:行星齿轮与曲轴相连接,第二级减速经曲轴的游转带动摆线轮做偏心运动,曲轴旋转1周,摆线轮被沿与曲轴运动相反方向转动1个齿。
operating principle
工作原理
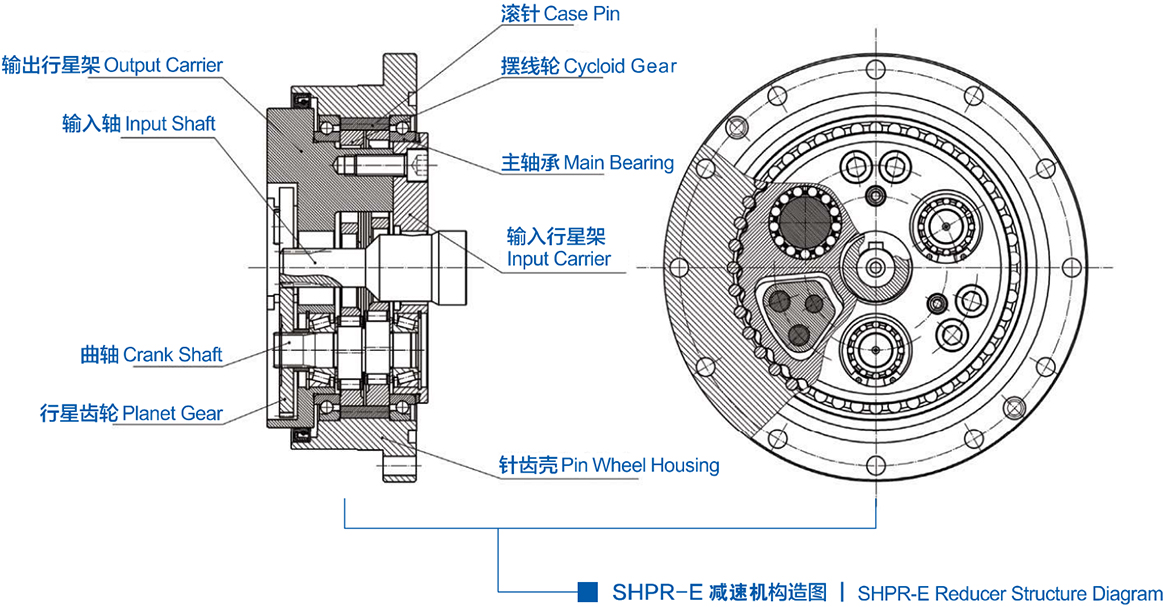
SHPR-E减速机是由一个行星齿轮减速机的一级和一个摆线针轮减速机的后级组成的二级减速机。第一级减速经输入轴的旋转由输入轴上的齿轮传递到行星齿轮,按齿数比进行减速;行星齿轮与曲轴相连接,第二级减速经曲轴的旋转带动摆线轮做偏心运动,曲轴旋转1周,摆线轮将沿与曲轴运动相反方向转动1个齿。
operating principle
工作原理
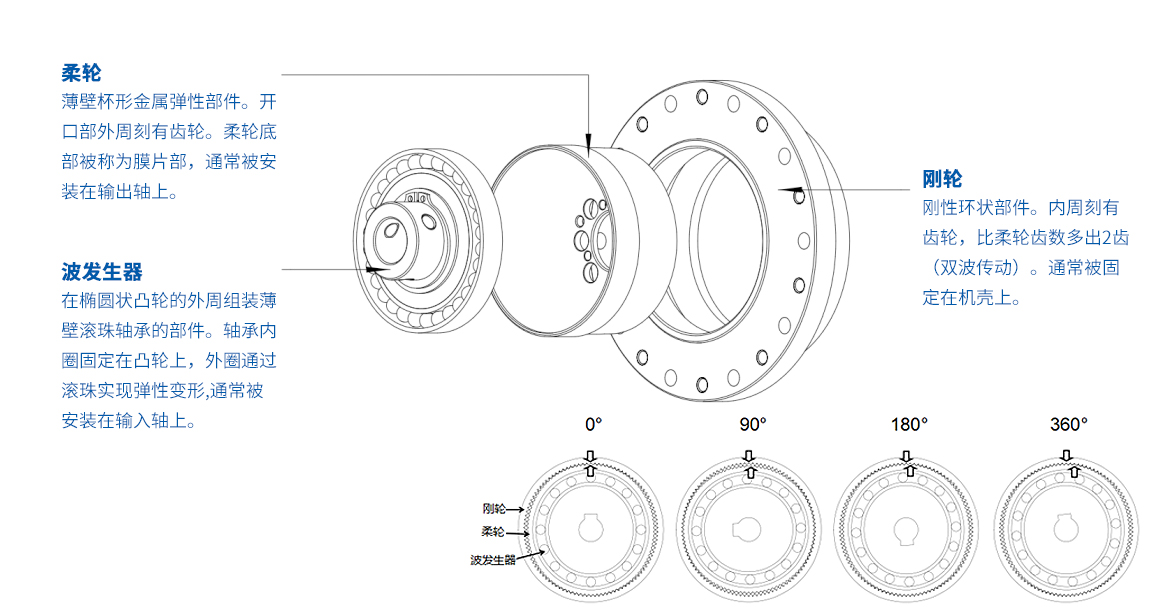
谐波齿轮传动是由美国发明家C.W.Musser于1955年发明创造的。谐波齿轮传动是一种依靠弹性变形运动来实现传动的新型机构,它突破了机械传动采用刚性构件机构的模式,使用了一个柔性构件来实现机械传动,从而获得了一系列其他传动所难以达到的特殊功能。由于在运行过程中,柔性构件的弹性变形是一个对称的谐波,因此得名谐波齿轮传动。




