The robot high-precision cycloid planetary reducer is composed of a front stage of planetary gear reducer and a rear stage of cycloid pin gear reducer. This reducer has the characteristics of high precision, large speed ratio, high rigidity, high overload and long service life, and has the advantages of low vibration, low noise and low energy consumption. It is one of the most commonly used reducers.
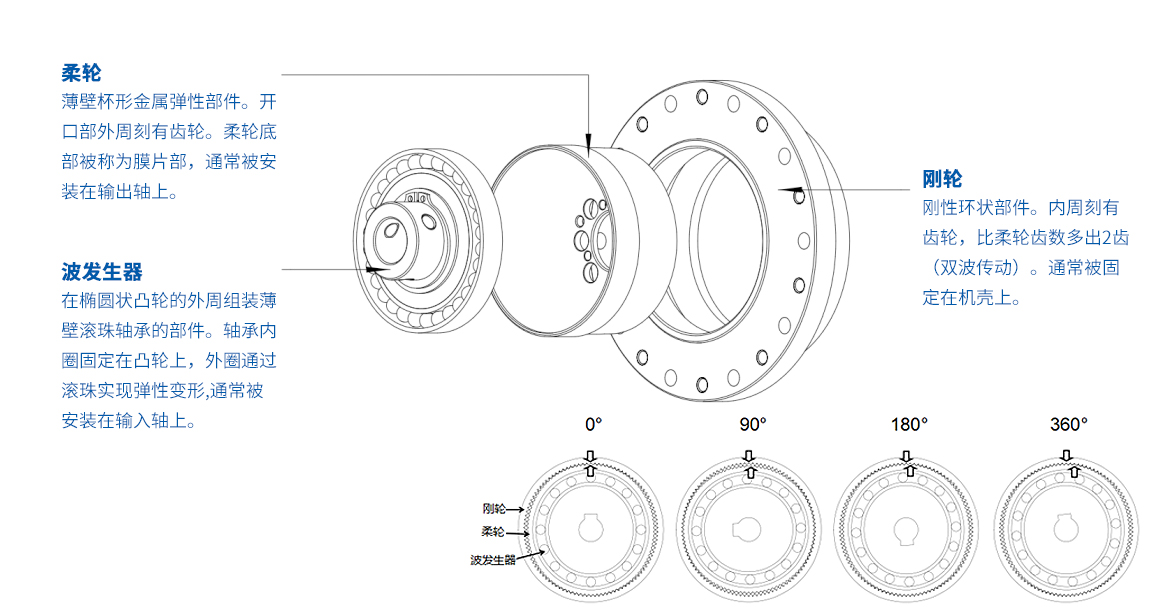
Harmonic drive reducer is a mechanical transmission device that uses the elastic deformation controlled by flexible components to transmit motion and power. It has the characteristics of large transmission ratio, wide range, high precision, small air return, small volume, light weight, stable transmission, low noise, and can transmit movement to the sealed space.
Huandong technology strives to provide customers with the overall scheme of high-precision reducer required to cover 3-1000kg load robot.
Industrial robot
medical care
wind power
radar
solar energy
Aerospace
SHPR-C
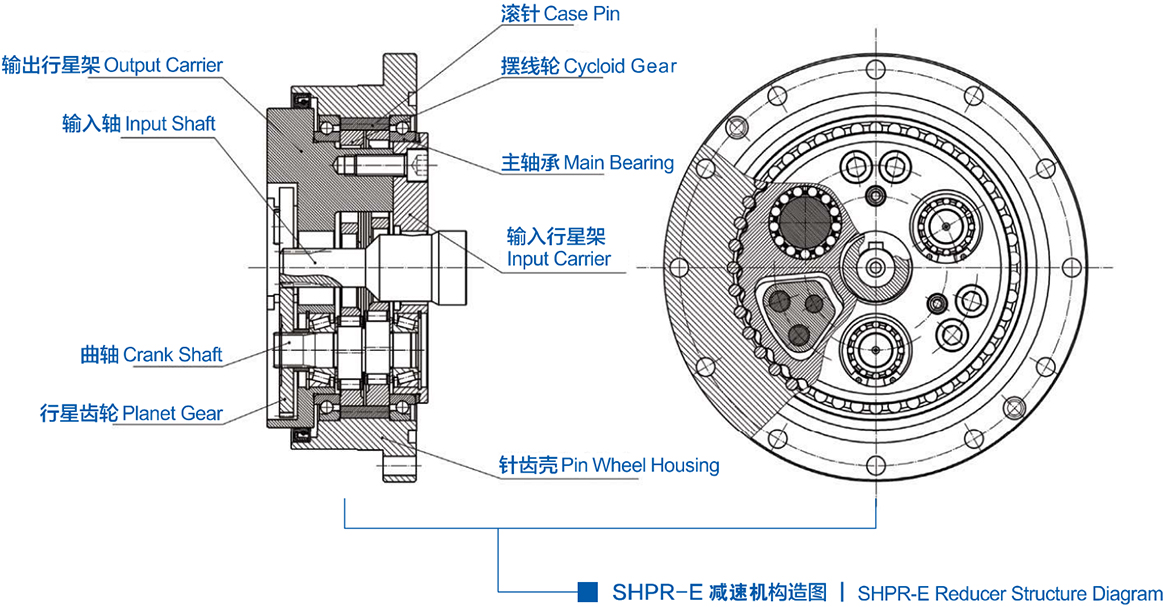
SHPR-E
Harmonic Reducer
operating principle
Shpr-c reducer is a two-stage reducer composed of the first stage of a planetary gear reducer and the rear stage of a cycloidal pinwheel reducer. The first reduction is transmitted from the big gear on the central gear to the planetary gear through the rotation of the central gear, and the reduction is carried out according to the gear number ratio: the planetary gear is connected with the crankshaft, and the second reduction drives the cycloid gear to make eccentric movement through the rotation of the crankshaft. The crankshaft rotates for 1 cycle, and the cycloid gear is rotated for 1 tooth in the direction opposite to the movement of the crankshaft.
Shpr-e reducer is a two-stage reducer composed of the first stage of a planetary gear reducer and the rear stage of a cycloidal pinwheel reducer. The first stage deceleration is transmitted from the gear on the input shaft to the planetary gear through the rotation of the input shaft, and decelerates according to the tooth ratio; The planetary gear is connected with the crankshaft. The second reduction drives the cycloid gear to make eccentric movement through the rotation of the crankshaft. The crankshaft rotates for 1 cycle, and the cycloid gear will rotate 1 tooth in the opposite direction to the crankshaft movement.
Harmonic gear drive was invented by American inventor c.w.musser in 1955. Harmonic gear transmission is a new type of mechanism that relies on elastic deformation movement to realize transmission. It breaks through the mode that mechanical transmission adopts rigid component mechanism, and uses a flexible component to realize mechanical transmission, thus obtaining a series of special functions that other transmissions are difficult to achieve. Because the elastic deformation of flexible components is a symmetrical harmonic during operation, it is named harmonic gear drive.